Сервопривод — это устройство, которое позволяет управлять углом поворота вала двигателя. Он состоит из электродвигателя, редуктора и датчика угла поворота. Библиотека Servo.h для Arduino позволяет легко управлять сервоприводом.
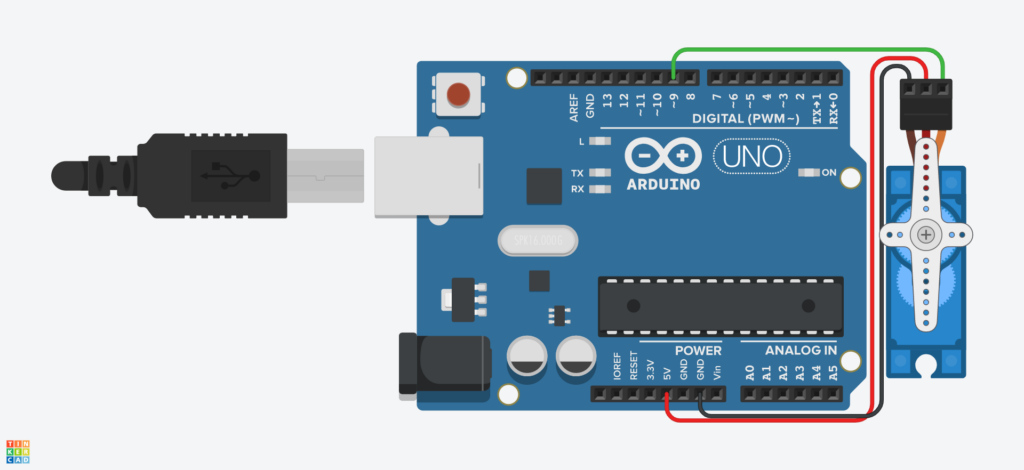
Подключение
| SERVO | ARDUINO |
|---|---|
| SIGNAL | D9~ |
| VCC | 5V |
| GND | GND |
Использование
Для начала работы с библиотекой Servo.h необходимо подключить её к вашему проекту. Это можно сделать, добавив строку #include <Servo.h> в начало вашего скетча.
После подключения библиотеки вы можете создать объект класса Servo, который будет представлять ваш сервопривод.
Теперь вы можете использовать метод attach() для привязки сервопривода к пину Arduino. Например, если у вас есть сервопривод, подключенный к пину 9, вы можете использовать следующий код: myservo.attach(9);
После привязки сервопривода вы можете установить угол поворота вала с помощью метода write(). Угол поворота может быть от 0 до 180 градусов. Например, чтобы повернуть вал на 90 градусов, вы можете использовать следующий код: myservo.write(90);
#include <Servo.h>
// Создаем объект класса Servo
Servo myservo;
void setup() {
Serial.begin(9600);
myservo.attach(9);
}
int s = 90;
void loop() {
if (Serial.available() > 0) {
s = Serial.parseInt();
}
myservo.write(s);
Serial.println(myservo.read());
}