! Заготовка
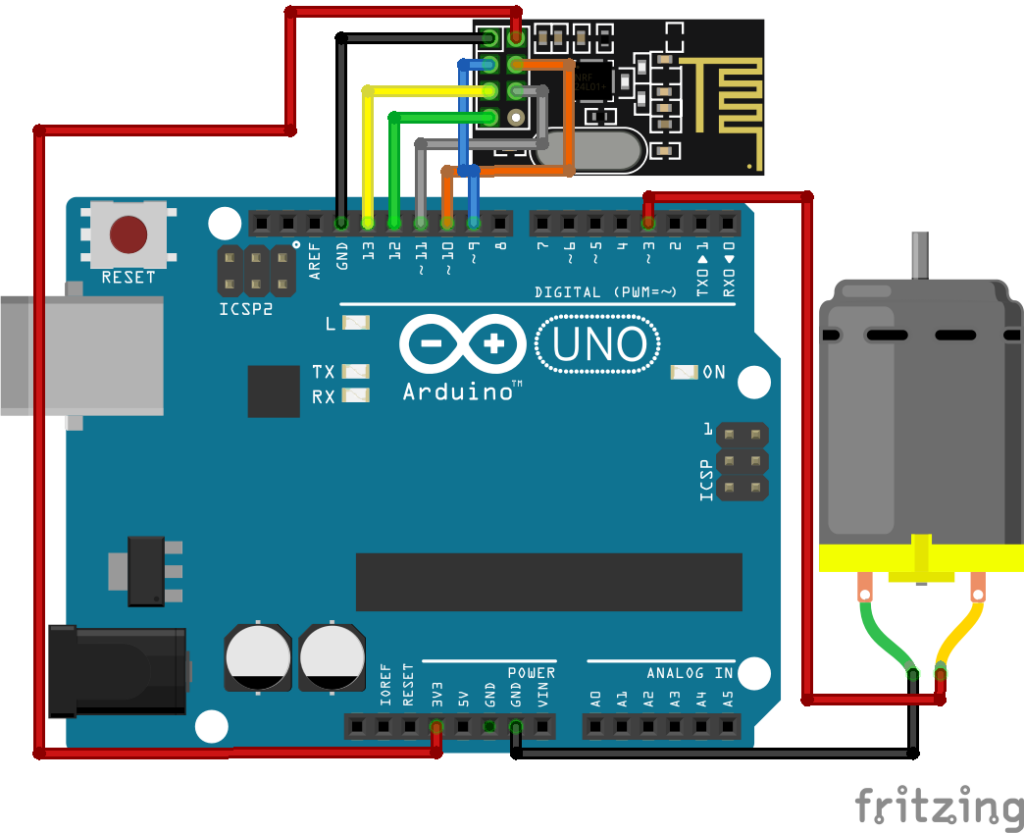
Подключение
| nRF24L01 | ARDUINO |
|---|---|
| GND | GND |
| VCC | 3V3 |
| CE | D9 |
| CSN | D10 |
| SCK | D13 |
| MOSI | D11 |
| MISO | D12 |
| IRQ |
Использование
В кодах ниже передаём сигнал с джойстика на моторчик (скоростьь). Не помню через, что именно контролили всс или гнд
| MOTOR | ARDUINO |
|---|---|
| VCC | D3~ |
| GND | GND |
Хрень подключается через злоебучие мосфеты повышайки. А питается от внешнего 12v+ аккума
/*
https://lesson.iarduino.ru/page/urok-26-4-soedinyaem-dve-arduino-po-radiokanalu-cherez-nrf24l01/
ПРИЁМНИК
*/
#include <RF24.h>
#include <nRF24L01.h>
// PWM Pin
#define motor_out 3
// Пины приёмника
RF24 radio(9, 10);
int data[4]; // Может быть массивом
int speed;
int joy_x;
int joy_y;
int joy_btn;
void setup() {
Serial.begin(9600);
pinMode(motor_out, OUTPUT);
radio.begin();
radio.setChannel(
5); // Указываем канал приёма данных (от 0 до 127), 5 - значит приём
// данных осуществляется на частоте 2,405 ГГц (на одном канале может
// быть только 1 приёмник и до 6 передатчиков)
radio.setDataRate(
RF24_250KBPS); // Указываем скорость передачи данных (RF24_250KBPS,
// RF24_1MBPS, RF24_2MBPS), RF24_1MBPS - 1Мбит/сек
radio.setPALevel(RF24_PA_HIGH); // Указываем мощность передатчика
// (RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm,
// RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm)
radio.openReadingPipe(
1, 0x1234567890LL); // Открываем 1 трубу с идентификатором 0x1234567890
// для приема данных (на ожном канале может быть
// открыто до 6 разных труб, которые должны
// отличаться только последним байтом идентификатора)
radio.startListening();
}
void loop() {
if (radio.available()) {
radio.read(&data, sizeof(data));
speed = map(data[0], 0, 1023, 0, 255);
//
joy_x = data[1];
joy_y = data[2];
joy_btn = data[3];
//
analogWrite(motor_out, speed);
Serial.print("[#] Current power is ");
Serial.print(speed * 100 / 255);
Serial.println("%");
//
Serial.print("X ");
Serial.println(joy_x);
Serial.print("Y ");
Serial.println(joy_y);
Serial.print("BTN ");
Serial.println(joy_btn);
}
delay(5);
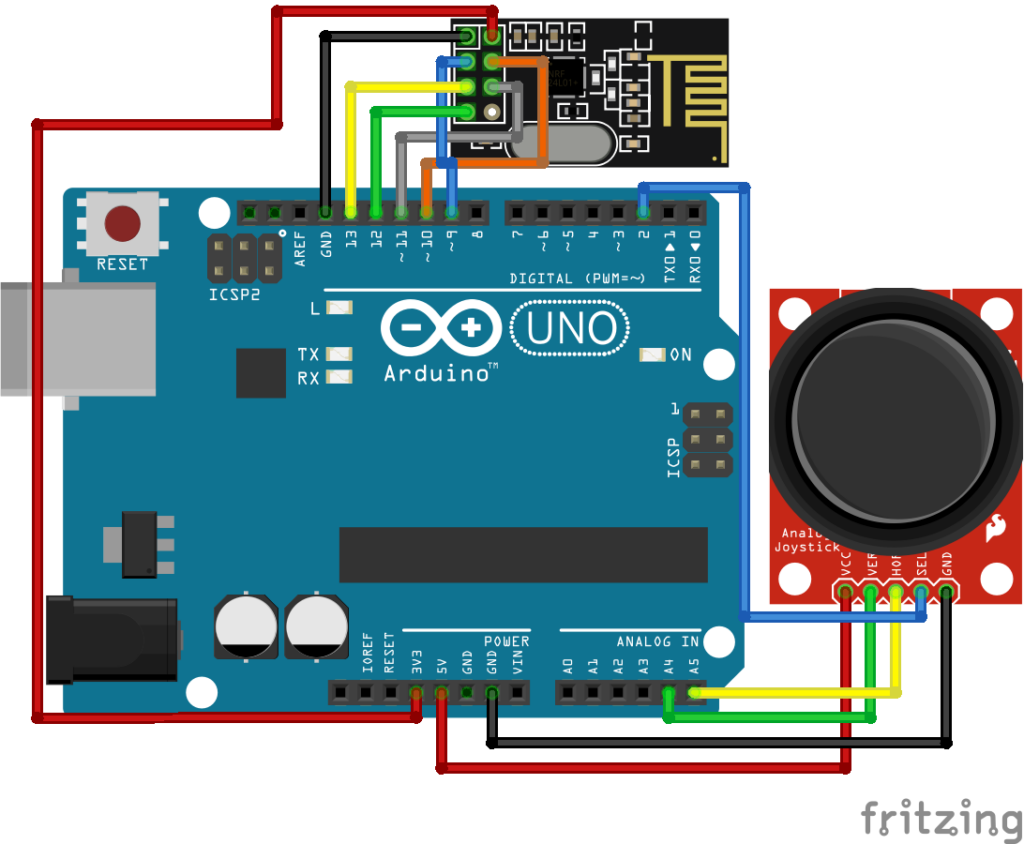
}| JOYSTICK | ARDUINO |
|---|---|
| BTN | D2 |
| X | A5 |
| Y | A4 |
| VCC | 5V |
| GND | GND |
/*
https://lesson.iarduino.ru/page/urok-26-4-soedinyaem-dve-arduino-po-radiokanalu-cherez-nrf24l01/
ПЕРЕДАТЧИК
joystick
x - A5
y - A4
btn - D2
*/
#include <RF24.h>
#include <nRF24L01.h>
// Joystick
#define joy_x A5
#define joy_y A4
#define joy_btn 2
// PWM Pin
#define potentiometer_in A3
// Пины приёмника
RF24 radio(9, 10);
int data[4]; // Может быть массивом
int speed;
void setup() {
Serial.begin(9600);
pinMode(joy_x, INPUT);
pinMode(joy_y, INPUT);
pinMode(joy_btn, INPUT);
pinMode(potentiometer_in, INPUT);
radio.begin();
radio.setChannel(
5); // Указываем канал приёма данных (от 0 до 127), 5 - значит приём
// данных осуществляется на частоте 2,405 ГГц (на одном канале может
// быть только 1 приёмник и до 6 передатчиков)
radio.setDataRate(
RF24_250KBPS); // Указываем скорость передачи данных (RF24_250KBPS,
// RF24_1MBPS, RF24_2MBPS), RF24_1MBPS - 1Мбит/сек
radio.setPALevel(RF24_PA_HIGH); // Указываем мощность передатчика
// (RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm,
// RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm)
radio.openReadingPipe(
1, 0x1234567890LL); // Открываем 1 трубу с идентификатором 0x1234567890
// для приема данных (на ожном канале может быть
// открыто до 6 разных труб, которые должны
// отличаться только последним байтом идентификатора)
}
void loop() {
data[0] = analogRead(potentiometer_in);
data[1] = analogRead(joy_x);
data[2] = analogRead(joy_y);
data[3] = digitalRead(joy_btn);
radio.write(&data, sizeof(data));
delay(5);
}